Структурная схема системы автоматического регулирования (САР), графическое изображение такой системы в виде совокупности частей, на которые её можно разделить по определённым признакам, и связей между частями с указанием направления передачи воздействий. С. с. систем управления вообще строят по конструктивному, функциональному либо алгоритмическому принципу. В автоматическом регулировании используются преимущественно алгоритмические С. с., полностью отображающие динамические свойства САР. По дифференциальным уравнениям, описывающим некую САР, можно построить её алгоритмическую С. с., и наоборот, зная такую С. с.. можно составить дифференциальные уравнения, описывающие САР.
На С. с. изображают звенья САР (которым ставят в соответствие передаточные функции звеньев или операторы выполняемых ими нелинейных преобразований), связи и узлы (точки разветвления связей). Среди важнейших звеньев с элементарными алгоритмами различают: динамические (изменяющие входное воздействие во времени) — интегрирующие, дифференцирующие, временной задержки; формирующие (изменяющие масштаб и форму входного воздействия и т.п.) — пропорциональные, модуляционные, импульсные; арифметические — суммирующие, множительные и т.п.; логические (осуществляющие логические операции над входными величинами). Линейные динамические и масштабные звенья, а также преобразователи функциональные изображают на С. с. прямоугольниками, сумматор — кружком, разделённым на секторы (секторы, к которым подводятся вычитаемые, часто зачерняют), узел — жирной точкой на пересечении соответствующих связей (рис. 1). Передаточной функцией (ПФ) отдельного звена или САР в целом называется отношение изображений (см. Лапласа преобразование) их выходных и входных величин (при нулевых начальных условиях). ПФ полностью описывает динамические свойства систем них звеньев. Обычно её обозначают W (s) или W (p) либо просто W (s или р — аргумент преобразования Лапласа).
Любую линейную часть САР с сосредоточенными постоянными параметрами можно расчленить на элементарные, далее неделимые звенья четырёх типов — интегрирующие, дифференцирующие, масштабные и суммирующие. Реальные САР (у которых степень числителя ПФ не выше степени знаменателя) можно представить, как правило, звеньями всего трёх типов (без дифференцирующих). Расчленение на элементарные звенья удобно при моделировании САР на аналоговых вычислительных машинах. При др. методах исследования линейную часть обычно расчленяют на более сложные типовые звенья: первого порядка — неидеальные дифференцирующие, интегро-дифференцирующис, апериодические; второго порядка — неидеальные интегрирующие, колебательные, запаздывающие и др. Порядок линейного звена С. с. определяется порядком описывающего его динамику дифференциального уравнения.
Поскольку ПФ систем адекватно описывают их динамические свойства, одну С. с. можно заменить другой, эквивалентной ей, при единственном необходимом и достаточном условии — равенстве их ПФ. При этом преобразование обыкновенных линейных С. с. производится в соответствии с правилами преобразования соединений простейшего типа — последовательных, параллельных и с обратной связью (рис.2). С. с. в целом и звенья любого порядка выше второго могут быть заменены несколькими С. с. или звеньями порядка не выше второго, что значительно упрощает анализ и синтез САР.
При структурном исследовании САР наряду со С. с. пользуются ориентированными графами (см. Графов теория), вершинам которых ставят в соответствие параметры системы, а ребрам — ПФ или операторы функциональных преобразований.
Лит.: Петров Б. Н., О построении и преобразовании структурных схем, «Изв. АН СССР. Отделение технических наук», 1945, №12; Солодов А. В., Линейные системы автоматического управления с переменными параметрами, М., 1962: Шаталов А. С., Структурные методы в теории управления и электроавтоматике, М. — Л., 1962; Воронов А. А., Основы теории автоматического управления, ч. 1—3, М., 1965—70; Техническая кибернетика. Теория автоматического регулирования, под ред. В. В. Солодовникова, кн. 1, М., 1967.
А. А. Воронов.
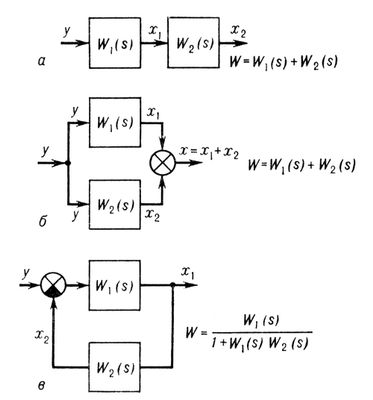
Рис. 2. Простейшие соединения линейных звеньев: а — последовательное; б — параллельное; в — с отрицательной обратной связью; Wi(s) — передаточная функция I-го звена; y — входное воздействие (сигнал); x — выходная величина (сигнал).
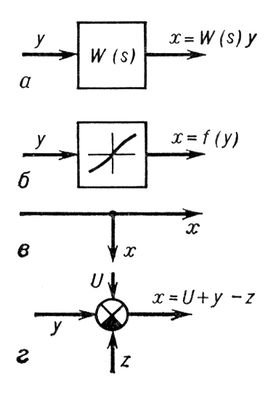
Рис. 1. Изображение элементов структурных схем: а — линейное звено; б — функциональный преобразователь; в — узел; г — сумматор; W(s) — передаточная функция; y, U, z — входные воздействия (сигналы); x — выходная величина (сигнал).