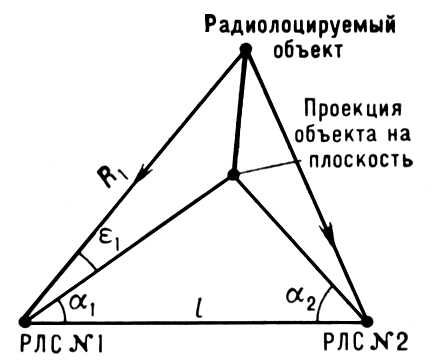
Рис. 2. Схема определения координат объекта: L — расстояние между РЛС № 1 и РЛС № 2; a1 и a2 — углы, определяющие азимуты объекта, полученные соответственно на РЛС № 1 и РЛС № 2; e1 — угол места объекта, полученный на РЛС № 1; R1 — наклонная дальность объекта относительно РЛС № 1.